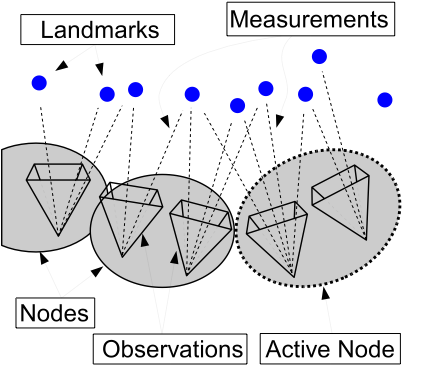
Monocular SLAM as a graph of coalesced observations (with Ethan Eade)
This work represents a new approach to SLAM, and has been specifically designed to address the consistency problem suffered by EKF and particle filter approaches. This technique also has the benefit that it permits much larger maps to be acquired and used.
No comments:
Post a Comment
Note: only a member of this blog may post a comment.